Abstract
This is a 11-week project of the MAS ETH in Architecture and Digital Fabrication explores the potential
of novel digital fabrication processes
to implement a full-scale construction project at Rümlang, Zürich. The topic combines 2 Gramazio Kohler
Research`s projects,
Robotic Plaster Spraying and Human-Machine Collaboration, to propose new design and fabrication
methodologies under the name of Intuitive
Robotic Plastering.
On one hand the concept of Human-Machine Collaboration(Intuitive Design) is to think how human gestures
are used as a design tool expressing very singular and sensible design process. On the other hand,
Robotic Plaster
Spraying allows to think through a different
paradigm where and how plaster is applied by iteration of fine and subtle layers on the wall.
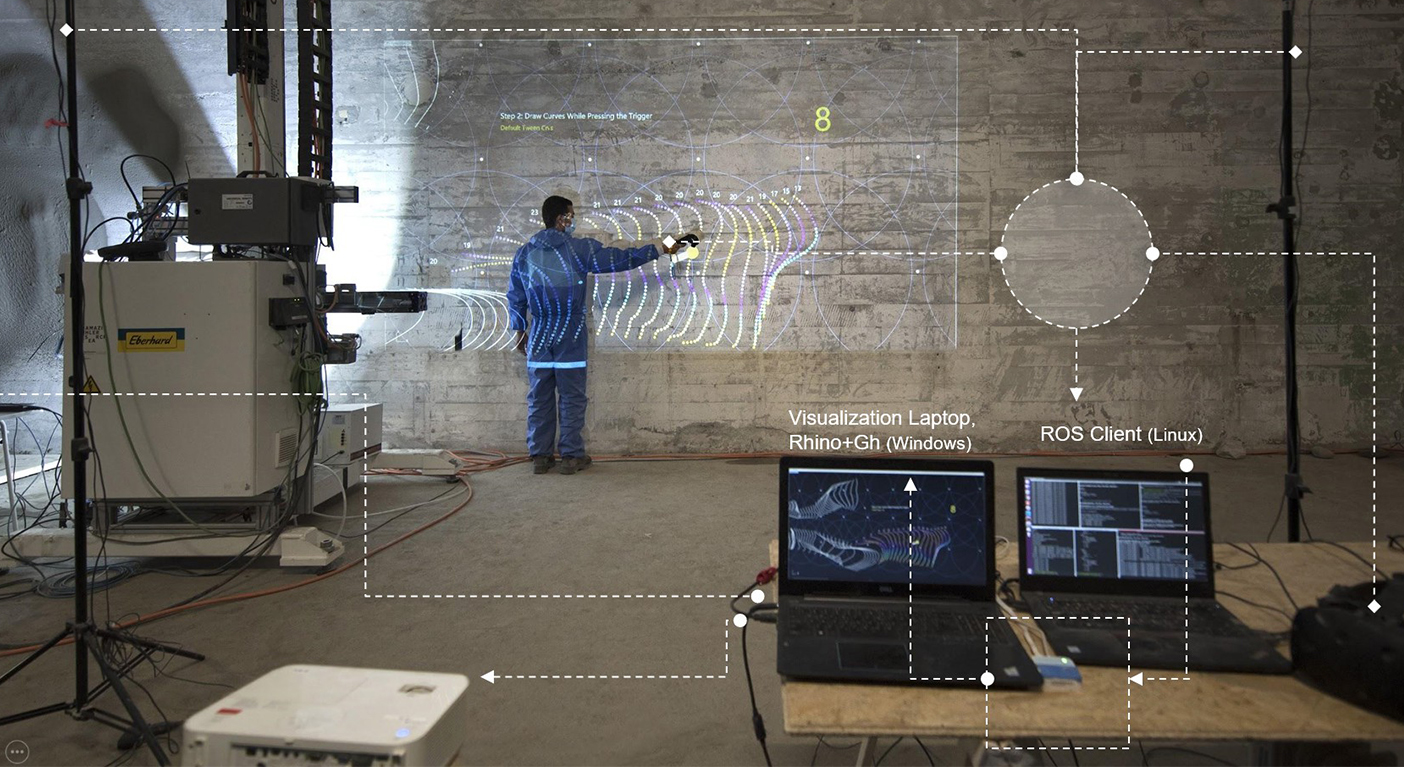
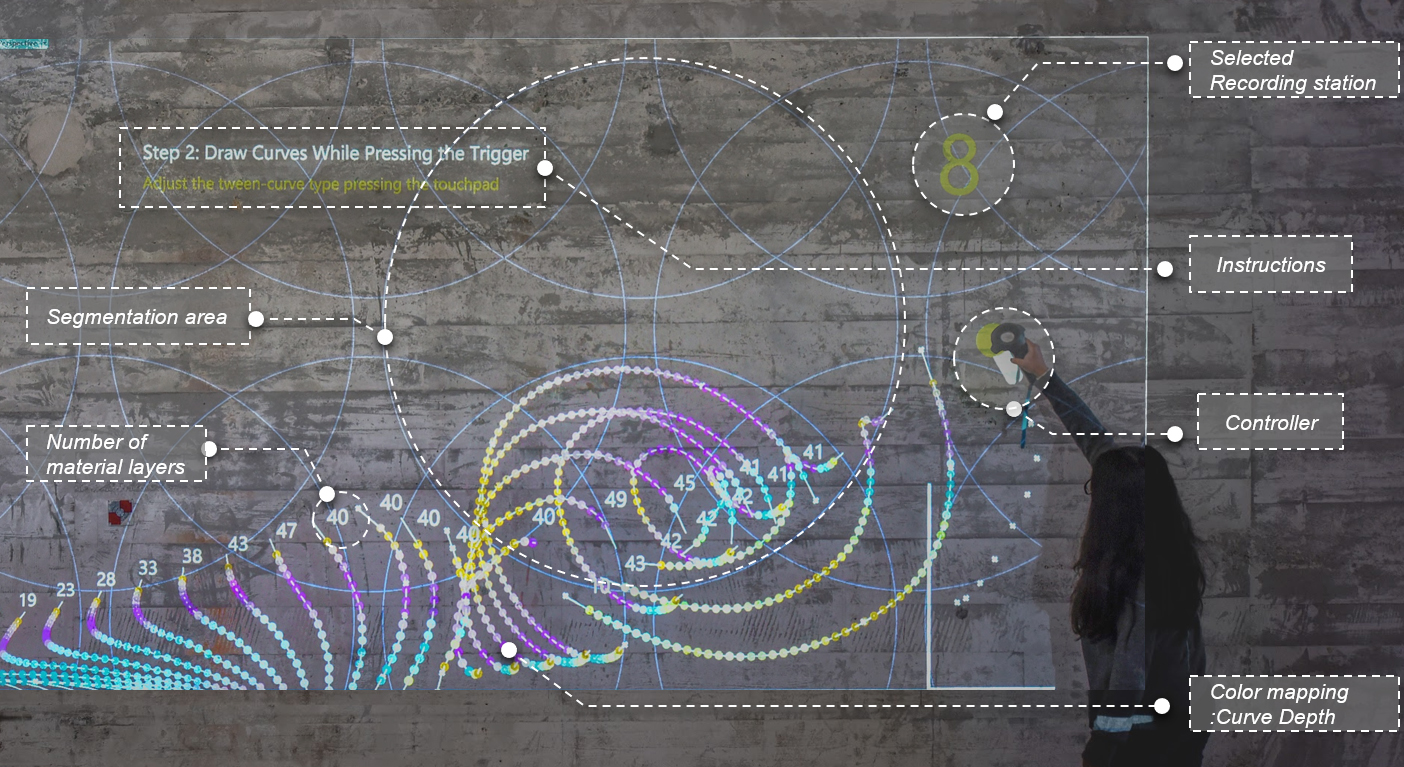
Intuitive Design
The intuitive design workflow begins with the input of the human gesture and the users could have an immediate visual feedback on their work which allows they to adjust the input accordingly. The gesture is tracked by HTC Vive system and the recorded data gets adjusted to the fabrication parameters by the interactive system developed in Rhino and Grasshopper as a plateform.
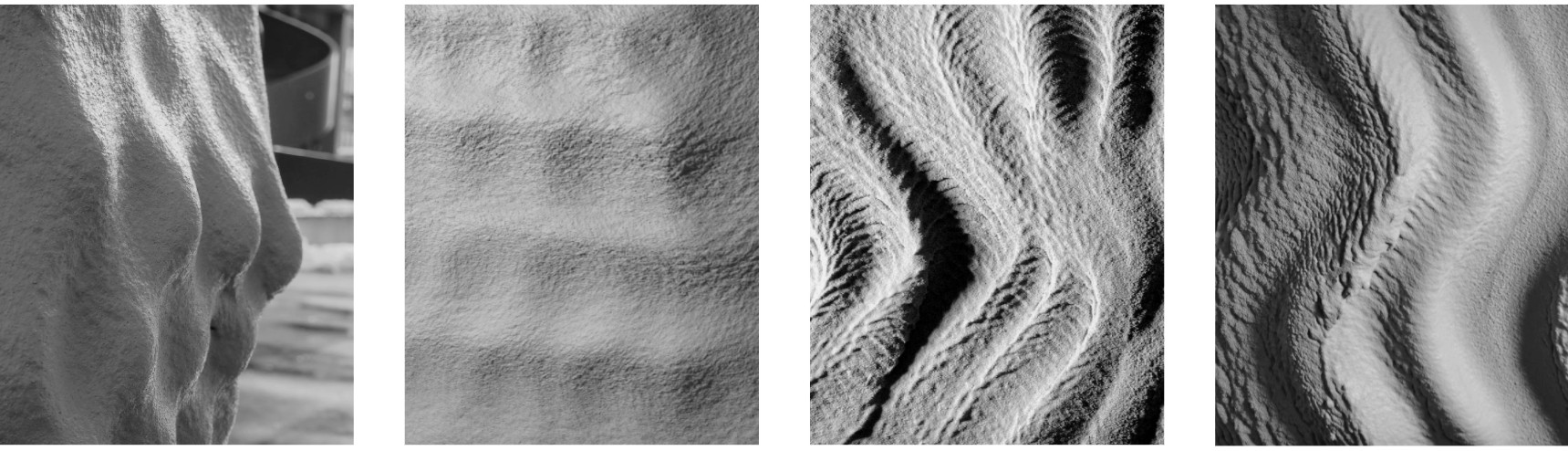
Prototyping and Spraying methods
Before moving to the site, a series of prototyping is conducted by spraying plaster on the 1.2m x 2m
panels,
which largely helps us understand the influence of parameters like velocity, angle and distance of
spraying (distance between wall and robot TCP)
on the material behavior.
Three basic parameters are to develop the robotic spraying strategy.The end-effector distance and the
velocity of spraying
are mapped taking into account the recorded human gesture. Remapping these values according to the
limitations of the robot and using feedback from the prototypes we initially did.
Initial scan
Initial spraying
Updating scanned mesh
Ed values updated
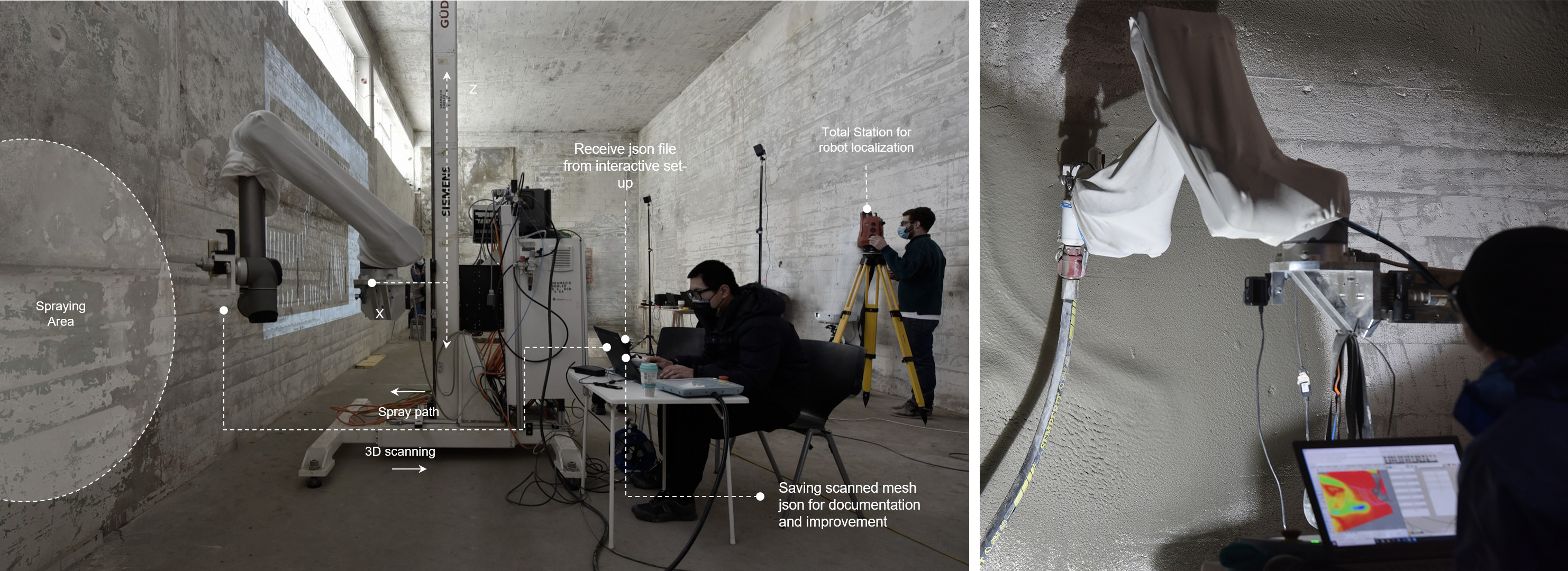
On-site Construction and Segmentation
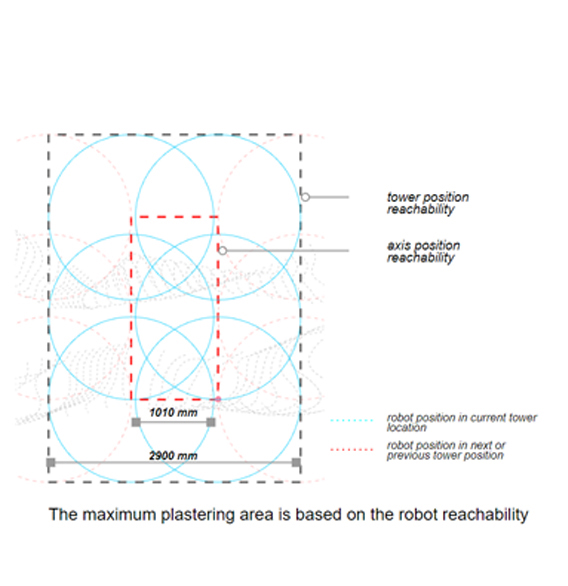
Global localization and local segmentation are two important parts of on-site fabrication. For the
global localization it requires 11
tower positions to finish the overall design and the local segmenting , base on the robot reachability
and the design, it requires
2 to 4 axis positions to cover the design of current tower location.
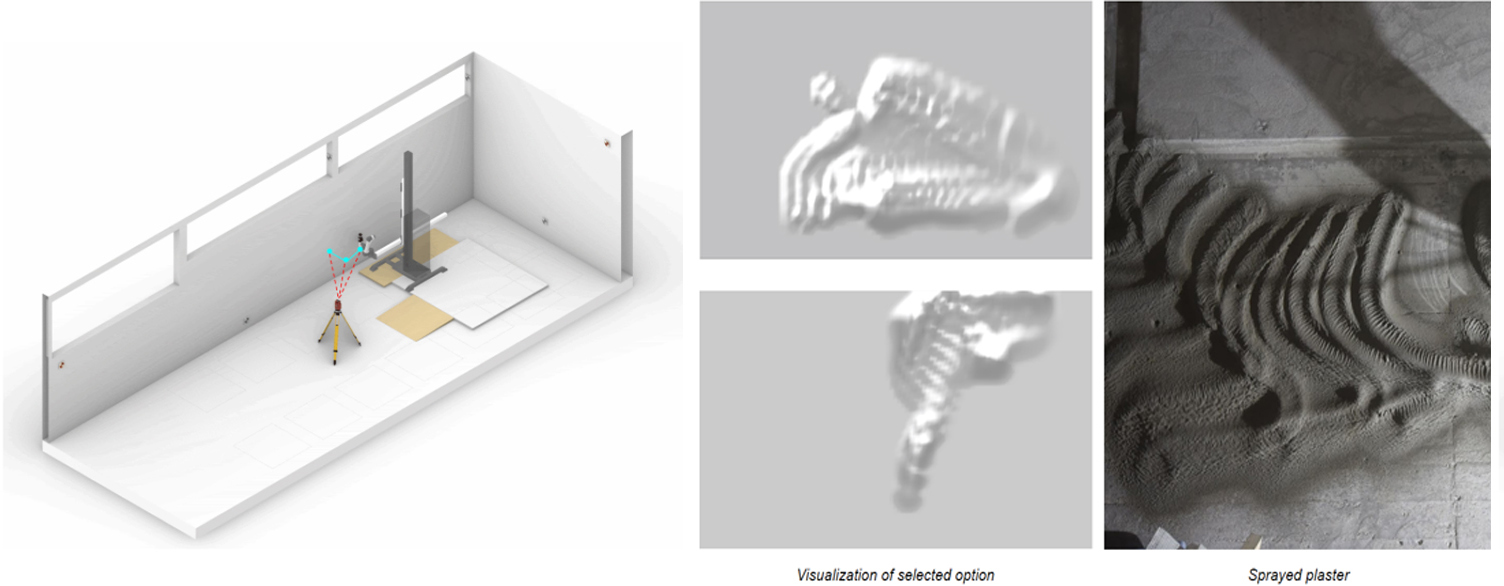
The final result is the design and construction of an interior space within an existing structure at
Rümlang.
The room offers us approximate 200m² to apply an adaptive thin layer printing process with an
interactive design procedure –
where a robotic arm sprays plaster following recorded hand gestures, creating an interplay between human
instructed and
digitally controlled fabrication processes with new aesthetic of conventional material.

.JPG)
.JPG)
.jpg)